Abgeschlossene Projekte
PINK
RADARBASIERTES, MODULARES ELEKTRONIKSYSTEM MIT HÖCHSTER PRÄZISION FÜR INDUSTRIELLE TEST- UND KALIBRIERAUFGABEN
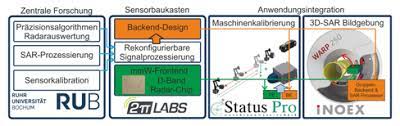
Das Projekt PINK hat die Erforschung der Einführung von innovativer Radarsensorik in industriellen Applikationen zum Ziel und gliedert sich in zwei anwendungsspezifische Teile, die auf der neuen modularen Breitband-Radarhardware von 2π-LABS im Frequenzbereich >116 GHz aufsetzten.
3D-PIPE-SAR: In den letzten Jahren wurde Radartechnologie in der eindimensionalen Breiten- und Dickenmessung von extrudierten Kunststoffrohren in der Qualitätssicherung etabliert. Ziel ist die Integration der Radartechnologie in bildgebende Rohr-Scanner-Systeme, um eine dreidimensionale 100% Prüfung der Rohre auf Lunker, Risse oder Verunreinigungen zu ermöglichen.
Präzisionsradar für die Maschinenkalibrierung: Jüngst wurde von RUB-INSYS in Zusammenarbeit mit 2π-LABS und StatusPro gezeigt, dass Radartechnologie im Labor Messgenauigkeiten von wenigen Mikrometern erreicht und damit potenziell eine geeignete Alternative zu teurer optischer Messtechnik in der Maschinenkalibrierung darstellt. Jedoch existieren aber immer noch offene Fragestellungen. Ziel ist die Entwicklung eines hochpräzise messenden Radarsensordemonstrators mit höchstmöglicher absoluter Genauigkeit.
Partner
2π-LABS GmbH, iNOEX GmbH, Ruhr-Universität Bochum (Lehrstuhl für Integrierte Systeme), Ruhr-Universität Bochum (Lehrstuhl für Hochfrequenzsysteme), Status Pro Maschinenmesstechnik GmbH
Fördergeber
BMBF VDI VDE-IT
Webseite
https://www.elektronikforschung.de/projekte/pink
Ansprechpartner
Lukas Piotrowsky
URBANSens
Umwelteffiziente Flugroutenberechnung autonomer, vernetzter Flugsysteme mit innovativer Sensorik zur Windfeldmessung
Unbemannte Flugsysteme (UAS) werden in naher Zukunft vor allem im urbanen Raum eine zunehmende Bedeutung erlangen. Dies betrifft vor allem im Logistiksektor die Verteilung von Paketen und Frachten auf der „letzten Meile“ in einem hochverdichteten Ballungsraum. Hinsichtlich einer Vielzahl parallel agierender Flugsysteme, z.B. in einem Schwarm, ist die Digitalisierung und Automatisierung dieser Systeme die zentrale Schlüsselkomponenten für eine erfolgreiche Umsetzung. Ein wichtiger Baustein ist dabei die intelligente Flugroutenplanung. Hierbei wird das Ziel verfolgt, die Flugrouten derartig zu planen, dass der Energieverbrauch bei der Bewältigung dieser, zum Beispiel durch das Ausnutzen von Aufwinden, auf ein Minimum reduziert wird. Zusätzlich zur Effizienz muss aber auch ein hohes Maß an Sicherheit auf der Flugroute eingehalten werden. Neben der Vermeidung von Kollisionen der UAS untereinander oder mit der Umgebung, ist das Umfliegen von gefährlichen Turbulenzen erforderlich. Für die beschriebenen Ziele der intelligenten Flugroutenplanung müssen die Windfelder innerhalb des relevanten Flugraums bekannt sein. Da vor allem für den urbanen Raum noch keine geeigneten Systeme existieren, welche die Windfelder hochauflösend genug erfassen können, werden im Rahmen dieses Projekts neue Sensorkonzepte entwickelt und untersucht, die diese Herausforderung meistern können. Der Fokus des Lehrstuhls für Integrierte Systemee liegt hierbei auf der Terahertz-Radartechnologie. Diese Sensortechnologie zeichnet sich durch eine hohe Präzision und Umgebungsauflösung bei relativ geringem Energieverbrauch und Sensorgewicht aus und ist daher für den Einsatz in einem UAS prädestiniert.
Partner
Infineon Technologies AG, Ruhr-Universität Bochum (Integrierte Systeme), Technische Universität Dresden (Flugmechanik und -regelung am Insstitut für Luft- und Raumfahrttechnik, Hochfrequenztechnik am Institut für Nachrichtentechnik und Sprachtechnologie und Kognitive Systeme am Institut für Akustik und Sprachkommunikation)
Fördergeber
BMWI
Ansprechpartner
Marc Hamme
RadarVibro
Entwicklung eines radarbasierten Vibrationsprüfstandes zur Lebensdauerprüfung von Maschinenteilen
Um die Lebensdauer von mechanischen Bauteilen zu prüfen, werden diese durch Anregung in ihrer mechanischen Resonanz bis zum Ausfall belastet. Durch Messung der Amplitude und Schwingfrequenz während der Prüfung kann ein Versagen des Bauteils erkannt und die Lebensdauer bestimmt werden. Ziel des Projekts RadarVibro ist die Entwicklung eines Prüfstandes mit einem radarbasierten Vibrometer, welches die Schwingamplitude und Schwingfrequenz des Prüfteils misst und auswertet. Durch die kontaktlose Messung mittels Radartechnik ist die Überwachung des Bauteils nicht nur rückwirkungsfrei in unterschiedlichen Umgebungsbedingungen, wie z.B. in einer Klimakammer, möglich, es entfällt auch die aufwendige Instrumentierung mit nicht wiederverwendbaren Dehnungsmessstreifen als häufig genutzte Sensoren.
Partner
2π-LABS GmbH, SBS Sondermaschinen GmbH, Ruhr-Universität Bochum Lehrstuhl für Integrierte Systeme
Fördergeber
Bundesministerium für Wirtschaft und Klimaschutz (BMWK)
Ansprechpartner
DIEFORA
Entwicklung eines neuartigen industrietauglichen Dickenmesssystems von Einsatzmaterialien erstmals auf Basis fokussierender Radartechnologie
Zur Herstellung von Feinblechprodukten wird flachgewalzter Stahl in Stahl-Service-Zentren u.A. in Streifen definierter Breite geschnitten. Zur Einhaltung der Toleranz und Sicherstellung der Qualität werden in Stahl-Service-Zentren im Betrieb die Maße der Endprodukte erfasst und für den Kunden nachgehalten. Derzeit wird die Maßhaltigkeit dieser Streifenbreite optisch mittels Kameratechnik im Prozess überprüft. Die Messgenauigkeit der optischen Berfahren wird stark durch den Umgebungseinfluss beeinträchtigt und ist nicht kontinuierlich im Schneidprozess umsetzbar. Zusätzlich zur Information über die Breite der Stahlstreifen fordern die Kunden zur Qualitätskontrolle die Inline-Erfassung der Dickenwerte der geschnittenen Stahlstreifen. Zur Dickenbestimmung der Stahlstreifen während des Schneidprozesses wird ein neuartiges störungsunempfindliches erstmals radarbasiertes Messverfahren entwickelt. Ziel des Projekts ist die Entwicklung einer Dickenmessung von Blechen mit neuartig fokussierter Radartechnik. Dabei wird erstmals ein fokussierendes Linsensystem zur Strahlbündelung von Radarwellen entwickelt, um Messgenauigkeiten von bis zu 5 Mikrometern zu erzielen.
Partner
imess GmbH, Ruhr-Universität Bochum (Integrierte Systeme)
Fördergeber
BMWI AIF
Ansprechpartner
Niklas Muckermann
VERANO
Verteilte und effiziente Datenverarbeitung in digitalen Radarnetzwerken für das vollautomatisierte Fahren
Ziel des Projektes VERANO ist die Erforschung einer verteilten, effizienten Datenverarbeitung unter Einschluss von KI-Methoden in digitalen Radar-Netzwerken für das vollautomatisierte Fahren. Schwerpunkte bilden dabei die weitgehende Digitalisierung aller systemrelevanten Funktionalitäten sowie die Erarbeitung einer anwendungsspezifischen optimalen Rechenlastverteilung zwischen Netzwerkkontrollern, Sensorknoten (Sensor-Edge) und Zentralrechner. Durch Einsatz modernster RFSoC FPGAs in den Sensorknoten sollen unterschiedliche Rechenschritte und KI-Algorithmen bei der Signalprozessierung implementiert und deren Ergebnisse in einem TSN (Time Sensitive Network) zu hochperformanten Zentralcomputern gesendet werden. Die Vorprozessierung kann im einfachsten Fall aus der verlustfreien Komprimierung der Rohdaten bestehen und bis hin zu komplexen, KI-gestützten Verfahren unter Nutzung eines Rückkanals zum Zentralcomputer reichen. Die Optimierung der Rechenlastverteilung zwischen Sensorknoten und Zentralcomputer soll in Hinblick auf Applikationsanforderungen bzgl. „Bildqualität“, Kosten, Energieeffizienz, Zuverlässigkeit, Echtzeitfähigkeit … erfolgen. Durch Optimierung der Ressourceneffizienz wird ein wesentlicher Beitrag zur Nachhaltigkeit und zum Green Deal geleistet. Die Ergebnisse sind auch auf andere Sensortypen (Kamera, Lidar usw.) und Applikationen wie z.B. Industrie 4.0, Logistik, Medizintechnik übertragbar.
Partner
Infineon Technologies AG, Robert Bosch GmbH, Mercedes-Benz-AG, Missing Link Electronics GmbH, KPIT Technologies GmbH, Fraunhofer Institut IPMS, Universität Ulm, Ruhr-Universität Bochum, TU Braunschweig, Universität Kassel
Fördergeber
BMBF VDI VDE-IT
Webseite
https://www.elektronikforschung.de/projekte/verano
Ansprechpartner
Jan Schöpfel, Tobias Braun
KI-ROJAL
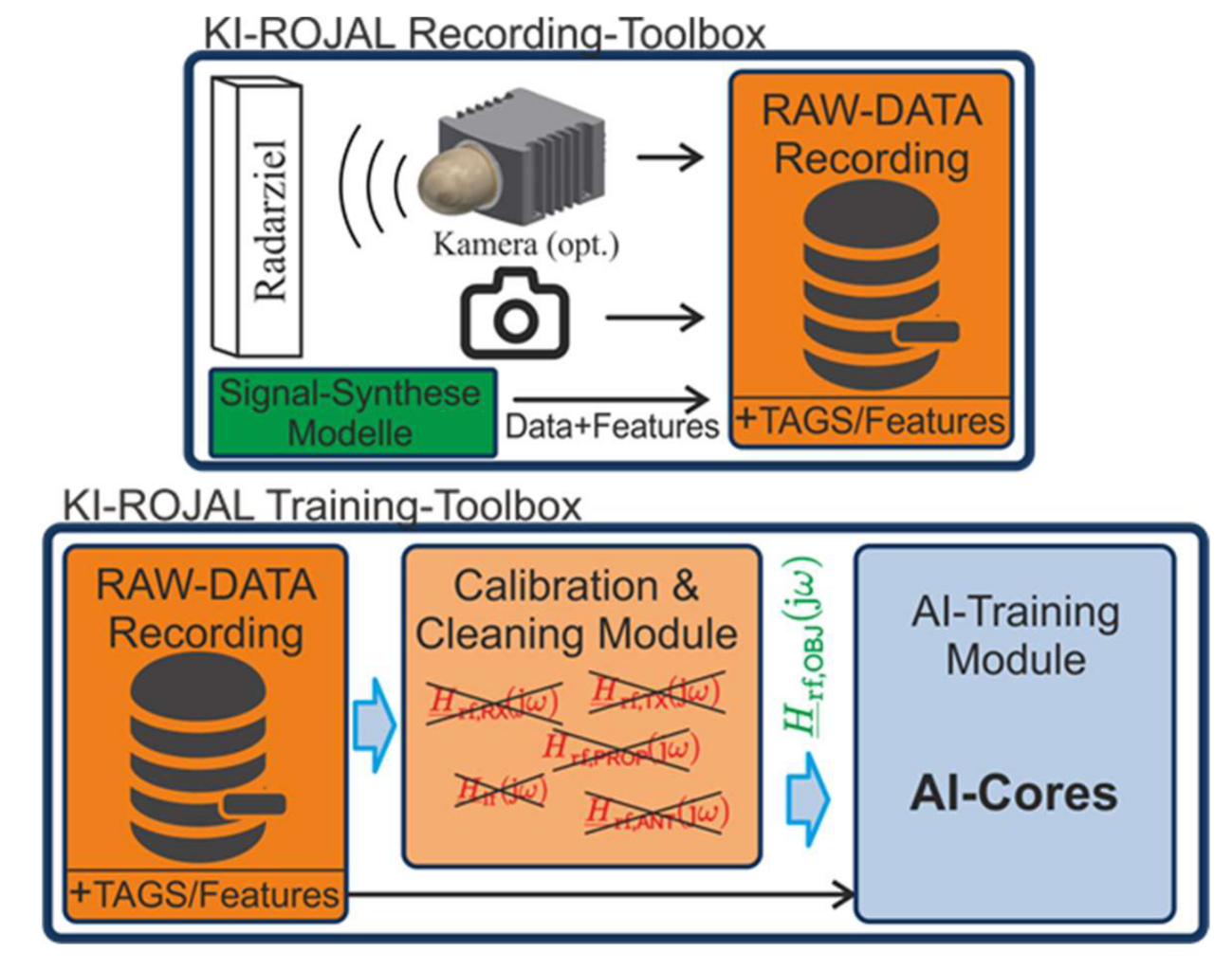
KI- Software-Umgebung zur erweiterten Objektanalyse mittels FMCW-Radar
Ziel des Verbundvorhabens „KI ROJAL“ ist es, das zentrale Problem der Sensorabhängigkeit von KI-Auswerteeinheiten in der Radartechnik zu lösen. Um den Signalanteil des zu vermessenden Objektes von Signaleinflüssen durch variieren-de Sensoreigenschaften (z. B. aufgrund von Herstellungs-schwankungen) trennen zu können, wird eine neuartige Kalibrierung der Radardaten erforscht. Damit soll zukünftig die generische und breit einsetzbare, sensorunabhängige Nutzung von KI-Algorithmen mit widerverwendbaren und portierbaren KI-Auswerteeinheiten möglich werden.
Partner
2π-LABS GmbH, iNOEX GmbH, KROHNE Innovation GmbH, Ruhr-Universität Bochum (Lehrstuhl für Integrierte Systeme)
Fördergeber
BMBF
Webseite
https://www.softwaresysteme.dlr-pt.de
Ansprechpartner
Salah Abouzaid
ADACORSA

AIRBORNE DATA COLLECTION ON RESILIENT SYSTEM ARCHITECTURES
Nach Amaras-Gesetz neigen wir dazu, die Wirkung einer Technologie kurzfristig zu überschätzen und ihre Auswirkungen langfristig zu unterschätzen. So werden auch Drohnen heutzutage hauptsächlich als Spielzeug für Kinder oder als Ermöglicher spektakulärer Kameraarbeit gesehen. Dabei gibt es nur wenige Technologien, die das Potenzial besitzen, solch grundlegende Veränderungen in unserer Mobilitätsinfrastruktur herbeizuführen, wie sie es die Drohnen könnten. Durch Anwendungen in der dritten Dimension besteht die Möglichkeit den enormen Druck auf unsere zunehmend überlasteten Verkehrsnetze zu lindern und damit das Verkehrssystem zu revolutionieren. Der Lehrstuhl für Integrierte Systeme entwickelt in ADACORSA Radar-Sensoren für die Erfassung des Umfeldes der Drohnen im Flugbetrieb.
Partner
Insgesamt 50 Partner. Näheres auf der Forschungswebseite.
Fördergeber
EU ECSEL/BMBF
Webseite
https://adacorsa.eu/
DAST
DAST: DIGITALES ABBILD DES STERILGUTKREISLAUFS MITTELS TRANSPONDERTECHNIK
Sterilgüter wie OP-Besteck sind ein wichtiges Werkzeug im Krankenhausalltag. Vor ihrem Einsatz bei einer Operation werden die Sterilgüter passend zur OP sortiert und in metallischen Sieben in den Operationsraum transportiert. Aufgrund der großen Anzahl von eingesetzten Sterilgütern ist der logistische Aufwand beträchtlich.
Um eine präzise Nachverfolgung der eingesetzten Sterilgüter zu ermöglichen, wird im Projekt DAST ein RFID-basiertes Informationssystem entwickelt, das es ermöglicht jedes individuelle Sterilgut nachzuverfolgen, sowie die korrekte Bestückung der Siebe zu gewährleisten. Der Lehrstuhl für Integrierte Systeme entwickelt dabei einen Transponderchip, der an jedem einzelnen Sterilgut aufgebracht wird und dieses so mit einer elektronisch lesbaren ID ausstattet.
Eine besondere Herausforderung ist dabei die Reflexion durch die vielen metallischen Gegenstände (OP-Besteck, Siebe) in der Umgebung des Transponderchips. Um trotz der Reflexionen ein zuverlässiges Auslesen der Transponderchips zu gewährleisten, wird in DAST der bisher nicht genutzte Frequenzbereich im 5,8 GHz Band genutzt.
Partner
Smartrac Specialty GmbH, ID4us GmbH, Fraunhofer IMS, Ruhr-Universität Bochum (Lehrstuhl für Integrierte Systeme), IT4process GmbH, Helios Universitätsklinikum Wuppertal, Universitätsklinikum Köln, Universitätsklinikum Essen
Fördergeber
Leitmarktagentur Gesundheit.NRW
Ansprechpartner
Dominic Funke
SeeYOU
SENSORSYSTEM ZUR SICHEREN ERKENNUNG VON FUSSGÄNGERN UND RADFAHRERN IM AUTONOMEN FAHRZEUGVERKEHR
Eine entscheidende Herausforderung zur erfolgreichen Einführung des autonomen Fahrens in den Straßenverkehr ist die sichere Erkennung von Fußgängern und Radfahrern. Heutige, von Fahrrädern bekannte optisch wirkende passive Reflektoren sind nutzlos bei Tageslicht, versagen bei Nebel und ändern das Kleidungsdesign. Aktive Warnsender benötigen hingegen schwer in Kleidung zu integrierende Batterien, die auch vollständig ausfallen können.
Zentrales Ziel von SeeYOU ist daher die Entwicklung eines auf passiven und damit batterielosen Reflektoren basierenden neuartigen RADAR-Systems (RAdio Detection And Ranging), welches Fußgänger und Fahrradfahrer durch autonome Fahrzeuge zuverlässig erkennt und voneinander und auch von sonstigen Objekten bzw. Hindernissen sicher unterscheidet.
Partner
ID4us GmbH, Ruhr-Universität Bochum (Lehrstuhl für Integrierte Systeme), Universität Duisburg-Essen (Fachgebiet Nanostrukturtechnik)
Fördergeber
BMBF VDI VDE-IT
Webseite
https://www.elektronikforschung.de/projekte/seeyou
Ansprechpartner
Tobias Braun, Jan Schöpfel
RadarSight

Website des Projekts: https://radarsight.nrw
Die Orientierung in unbekannten Umgebungen stellt nach wie vor eine große Herausforderung für Blinde und Sehbehinderte dar, vor allem dann, wenn diese Umgebungen variablen und dynamischen Einflüssen unterliegen und sich täglich ändern können. Dies schränkt nicht nur die Mobilität, sondern auch die Selbstständigkeit der Betroffenen signifikant ein. Verfügbare Hilfsmittel, wie der bewährte Langstock, bieten zumeist nur eine eingeschränkte Erfassung der Umgebung. Vor allem Ziele auf Brust- oder Kopfhöhe können zu gefährlichen Situationen führen.
Ziel des Projektes RadarSight ist die Entwicklung eines neuartigen, auf Radartechnologie basierenden Hilfsmittels mit dem Namen the Torch. Das handgetragene Hilfsmittel soll es den Blinden und Sehbehinderten ermöglichen, ihre gesamte Umgebung präzise zu erfassen und mittels eines akustischen und haptischen Feedbacks wahrzunehmen. Das Hauptaugenmerk liegt auf einer möglichst intuitiven Verwendung und Interpretation der Umgebung. Durch verschiedene Betriebsmodi soll das System in fast allen Situationen Verwendung finden und dadurch den Alltag von Blinden und Sehbehinderten nachhaltig bereichern.
Fördergeber
EFRE.NRW START-UP Transfer.NRW
Ansprechpartner
Patrick Kwiatkowski, Alexander Orth, Marc Hamme
RehaToGo
Die qualitative und quantitative Beurteilung der menschlichen Motorik ist in der Medizin unerlässlich, um u.a. Pathologien zu erkennen, mögliche Therapien präzise zu planen, Hilfsmittel geeignet auszuwählen sowie den Gesundungsprozess effizient zu begleiten. Während in führenden Behandlungszentren die Ganganalyse als objektives Messinstrument zur Evaluation und klinischen Bewertung der Fortbewegung bereits erfolgreich eingesetzt wird, ist diese Technologie für die meisten stationären Einrichtungen und Praxen unerschwinglich und deren Einsatz bislang räumlich an ein entsprechend ausgestattetes Ganglabor gebunden. Verlässt der Patient eine Behandlungseinrichtung, wird er für den Behandler „unsichtbar“. Mit dem Projekt RehaToGo soll erstmalig ermöglicht werden, dass Patienten komplexe motorische Messmöglichkeiten ins häusliche Umfeld mitnehmen und sowohl im unmittelbaren Feedback als auch in telemedizinischer Rückkopplung mit den Behandlern ambulant Übungsbehandlungen durchführen.
In dem Projekt sollen völlig neue Technologie der Bewegungsmessung der Extremitäten mittels RFID -Funketiketten (sogenannte „Tags“) entwickelt und in die Alltagskleidungen integriert werden. Mittels miniaturisierter Lesegeräte können die Informationen aufgezeichnet und verarbeitet werden.
Partner
ID4us GmbH, Universität Duisburg-Essen, Fraunhofer FHR, Unyt GmbH & Co. KG, Heinrich-Heine Universität, Universitätsklinikum Essen, Universität Paderborn, Luttermann GmbH, Ruhr-Universität Bochum (Lehrstuhl für Integrierte Systeme)
Fördergeber
Leitmarktagentur Gesundheit.NRW
Ansprechpartner
Alexander Orth, Patrick Kwiatkowski
ASRA
ADAPTIVE REGELUNG VON STAHLBÄNDERN IN WARMWALZSTRASSEN AUF BASIS HOCHPRÄZISER RADARSIGNALVERARBEITUNGSVERFAHREN
Im Projektvorhaben ASRA soll erstmals ein Radarverfahren zur Kontourmessung der Bandkante im Vorgerüst einer Warmwalzstraße entwickelt werden. Hierfür wird ein hochauflösendes, modulares und vollintegriertes mehrkanaliges Radarsystem erforscht, welches eine adaptive Echtzeitregelung der Walzen ermöglicht.
Partner
IMS Messsysteme GmbH, Fraunhofer FHR, SMS Group GmbH, Ruhr-Universität Bochum (Lehrstuhl für Integrierte Systeme), IMST GmbH
Fördergeber
Leitmarktagentur Produktion.NRW
Webseite
https://www.fhr.fraunhofer.de/de/geschaeftsfelder/produktion/asra-adaptive-radarsignalverarbeitungsverfahren.html
Ansprechpartner
Hakan Papurcu, Justin Romstadt
DAST
DAST: DIGITALES ABBILD DES STERILGUTKREISLAUFS MITTELS TRANSPONDERTECHNIK
Sterilgüter wie OP-Besteck sind ein wichtiges Werkzeug im Krankenhausalltag. Vor ihrem Einsatz bei einer Operation werden die Sterilgüter passend zur OP sortiert und in metallischen Sieben in den Operationsraum transportiert. Aufgrund der großen Anzahl von eingesetzten Sterilgütern ist der logistische Aufwand beträchtlich.
Um eine präzise Nachverfolgung der eingesetzten Sterilgüter zu ermöglichen, wird im Projekt DAST ein RFID-basiertes Informationssystem entwickelt, das es ermöglicht jedes individuelle Sterilgut nachzuverfolgen, sowie die korrekte Bestückung der Siebe zu gewährleisten. Der Lehrstuhl für Integrierte Systeme entwickelt dabei einen Transponderchip, der an jedem einzelnen Sterilgut aufgebracht wird und dieses so mit einer elektronisch lesbaren ID ausstattet.
Eine besondere Herausforderung ist dabei die Reflexion durch die vielen metallischen Gegenstände (OP-Besteck, Siebe) in der Umgebung des Transponderchips. Um trotz der Reflexionen ein zuverlässiges Auslesen der Transponderchips zu gewährleisten, wird in DAST der bisher nicht genutzte Frequenzbereich im 5,8 GHz Band genutzt.
Partner
Smartrac Specialty GmbH, ID4us GmbH, Fraunhofer IMS, Ruhr-Universität Bochum (Lehrstuhl für Integrierte Systeme), IT4process GmbH, Helios Universitätsklinikum Wuppertal, Universitätsklinikum Köln, Universitätsklinikum Essen
Fördergeber
Leitmarktagentur Gesundheit.NRW
Ansprechpartner
Dominic Funke
FALKE

FLUGSYSTEM-ASSISTIERTE LEITUNG KOMPLEXER EINSATZLAGEN
Die Vision des Projekts ist eine teilautomatisierte Sichtung von Patienten im Fall eines Massenanfalls von Verletzten (MANV) mittels kontaktloser Detektion der Vitalparameter anhand verschiedener Sensoren, die an einem unbemannten Flugsystem installiert sind. Die individuellen Sichtungsergebnisse der Patienten werden dann an einen telemedizinisch angebundenen Leitenden Notarzt weitergeleitet, der die Beurteilung der Ergebnisse vornimmt. Damit wird die zügige Sichtung und Priorisierung der notwendigen Versorgung, in puncto Behandlung und Transport in Krankenhäuser, unterstützt. Der Lehrstuhl bringt in dieses Projekt seine Expertise im Bereich der kontaktlosen Vitalparameterdetektion mittels Radar ein.
Partner
Docs in Clouds GmbH, flyXdrive GmbH, IMST GmbH, RWTH Aachen University (Lehrstuhl für Anästhesiologie, Institut für Flugsystemdynamik), Ruhr-Universität Bochum (Lehrstuhl für Integrierte Systeme)
Fördergeber
KMU-innovativ
Webseite
https://projekt-falke.org/
Ansprechpartner
Jan Siska
HYPATIA
HYBRIDE PACKAGING TECHNOLOGIE FÜR INNOVATIVE 300 GHZ RADAR ANWENDUNGEN
Ziel des Projektes HYPATIA ist die Bereitstellung einer massenmarkttauglichen und robusten elektronischen hetero-integrierten Höchstfrequenz-Technologie mit großer Bandbreite für industrielle Anwendungen. Dabei ist der Kern des Projektes der, die Vorteile der Substrattechnologien BiCMOS und mHEMT zu verknüpfen, um hierdurch eine industrietaugliche Basis für Höchstfrequenzsensoren zu realisieren. Dies wird anhand eines Radars auf Basis eines Silizium-Chips, welcher im Frequenzbereich von 300 GHz mit großer Bandbreite arbeitet. Verknüpft mit einer mHEMT-Schaltung werden durch rauscharme Empfangsschaltungen eine deutliche Steigerung der Reichweite und Signalqualität ermöglicht und sollen anspruchsvollen Anwendungen in der industriellen Messtechnik zur Verfügung gestellt werden.
Partner
SIKORA AG, Infineon Technologies AG, Fraunhofer IAF, Fraunhofer FHR, Ruhr-Universität Bochum (Lehrstuhl für Integrierte Systeme), IMST GmbH
Funding
BMBF VDIVDE-IT
Website
http://www.elektronikforschung.de/projekte/hypatia
TARANTO

TOWARDS ADVANCED BICMOS NANOTECHNOLOGY PLATFORMS FOR RF TO THZ APPLICATIONS
Ziel von TARANTO ist es, die führende Position der europäischen Halbleiterindustrie in der SiGe BiCMOS-Technologie weiter auszubauen und eine solide industrielle Basis für die Entwicklung neuer Produkte in den Bereichen Telekommunikation, Heim- und Fahrzeugelektronik zu schaffen. Dabei bestehen die technischen Hauptziele bei TARANTO zum einen darin, das neue Leistungsniveau von SiGe HBT aus früheren Projekten für die Massenproduktion tauglich zu machen und zweitens die Technologien auf die oben genannten Anwendungsbereiche zuzuschneiden. Dafür werden die TARANTO-Partner neue Charakterisierungsmethoden für Frequenzen bis zu einigen Hundert GHz auf der Geräte- und Schaltungsebene etablieren. Darüber hinaus wird das HBT-Kompaktmodell HICUM weiterentwickelt, um zukünftige Anwendungen zu unterstützen.
Partner
Insgesamt 34 Partner, Koordinator: ST Microelectronics S. A.; Deutsche Partner: Infineon Technologies AG, Infineon Technologies Dresden GmbH, Innovations for High Performance (ihp GmbH), MICRAM Microelectronic GmbH, Alcatel-Lucent Deutschland AG, Ruhr-Universität Bochum (Lehrstuhl für Integrierte Systeme), RWTH Aachen University, Technische Universität Dresden, Universität des Saarlandes, Universität Stuttgart, Karlsruher Institut für Technologie, Nokia Solutions and Networks GmbH&Co KG, Bergische Universität Wuppertal, Friedrich-Alexander-Universität Erlangen Nürnberg, Kathrein-Werke KG
Fördergeber
EU ECSEL/BMBF
radar4FAD

UNIVERSELLE RADARMODULE FÜR DAS VOLLAUTOMATISIERTE FAHREN
Autonomes Fahren, insbesondere auch im urbanen Umfeld, ist die Zukunft der Automobilindustrie. Eine Zukunftsvision, die bereits in einigen Jahren Wirklichkeit sein und unser Leben nachhaltig und positiv verändern wird. Die Frage, auf die es sich letztlich reduziert, ist: Kann die deutsche Automobil- und Zulieferindustrie diese Entwicklung treiben und damit ihren globalen Anspruch auf Technologie- und Marktführerschaft untermauern.
Mit dem Projekt radar4FAD soll dazu ein Beitrag geleistet werden, indem die essentielle Voraussetzung für das autonome Fahren, nämlich die vollständige robuste Umfelderkennung jederzeit und unter allen Randbedingungen, sichergestellt wird. Dabei muss das Radarsystem permanent unabhängig von Witterung, Tageszeit, Verkehrsaufkommen und anderen Einflüssen leistungsfähig sein. Im Laufe des Projekts soll ein flexibler Radar-Modulbaukosten entstehen, der kosteneffizient und damit großserientauglich für alle Arten von Radar-Anwendungen im Bereich des hochautomatisierten Fahrens eingesetzt werden kann. Im Rahmen des Projektes übernimmt der Lehrstuhl für Integrierte Systemedie Erforschung von integrierten Schaltungen für zukünftige Radarmodule schwerpunktmäßig für erweiterte Modulationsverfahren wie Orthogonal-Division Code Multiplex (OFDM) und schnellen Chirp-Sequenzen (CS).
Partner
Ruhr-Universität Bochum (Lehrstuhl für Integrierte Systeme), Infineon Technologies AG, Robert Bosch GmbH, Daimler AG, Karlsruhe Institute of Technology, Fraunhofer ENAS, Fraunhofer FHR, Innovations for High Performance (ihp), Universität Ulm, Chemnitzer Werkstoffmechanik GmbH, IMST GmbH
Fördergeber
BMBF VDIVDE-IT
Webseite
http://www.elektronikforschung.de/projekte/radar4fad
Radarmeter-3D
ENTWICKLUNG EINES RADARBASIERTEN SENSORSYSTEMS ZUR ADAPTIVEN KOMPENSATION DES 3D-POSITIONSFEHLERS VON INDUSTRIEROBOTERN
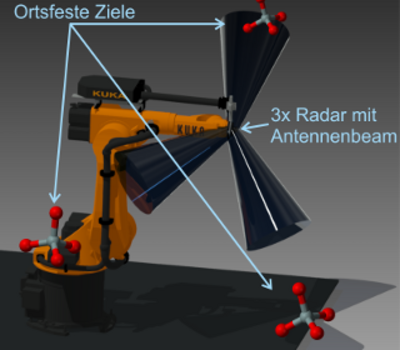
Industrieroboter hochpräzise und dennoch kostengünstig einsetzen zu können, das ist das Ziel des Forschungsprojekts Radarmeter-3D. Industrieroboter weisen eine meist sehr gute relative Positionsgenauigkeit auf. Das Erreichen einer hochpräzisen und belastungsunabhängigen absoluten Positionsgenauigkeit ist jedoch ein bisher nicht zufriedenstellend gelöstes Problem. Optische Sensorverfahren zur Positionsregelung sind empfindlich gegen Staub und Feuchtigkeit. Darüber hinaus sind die Sensoren entweder unpräzise, langsam und günstig, wie kamerabasierte Verfahren, oder präzise und schnell dafür aber teuer, wie z.B. laserbasierte Systeme.
Im Projekt wird ein Multi-Radar-Sensorsystem zur hochpräzisen und dreidimensionalen Positionsbestimmung erforscht. Das Messsystem wird hierfür mit mindestens drei Radar-Sensoren ausgestattet, die in Abhängigkeit von ortsfesten Referenzzielen die dreidimensionale Position des Roboters im Raum bestimmen. Zusätzlich liefert eine Kopplung mit einer Umgebungssimulation a-priori-Information für eine smarte Signalverarbeitung und Zielinterpretation. Der Sensor ist dann in der Lage anhand der aktuellen Messungen Winkelfehler zu kompensieren. Ein solcher -dank Radar-Positionssensor- flexibel einsetzbarer Industrieroboter erschließt viele Anwendungsfelder, wie z.B. die Vermessung und Qualitätssicherung von Fertigungsteilen in Industrieprozessen oder die Navigation von autonomen mobilen Robotern. Das Projekt wurde in den Leitmarktwettbewerben der LeitmarktAgenturNRW erfolgreich beantragt und wird zu gleichen Teilen vom Land NRW und der EU gefördert.
Partner
IGA mbH, Krohne Innovation GmbH, IBG Robotronic GmbH, Ruhr-Universität Bochum (ESIT, EST, Lehrstuhl für Integrierte Systeme), HÜBNER GmbH & Co. KG, Etalon AG, Wilhelm Schröder GmbH, ISRA VISION AG, LBBZ-NRW GmbH
Fördergeber
Leitmarktagentur Produktion.NRW
RaVis-3D

ENTWICKLUNG EINES NAVIGATIONSHILFSMITTELS FÜR MENSCHEN MIT SEHBEHINDERUNG
Ein Navigationssystem für blinde und sehbehinderte Menschen – das war das Ziel des Forschungsprojekts RaVis-3D. Mit diesem neuen System kann der Träger sein räumliches Umfeld akustisch wahrnehmen – ähnlich also dem Ortungssystem einer Fledermaus – und so auch in fremder Umgebung sicher zu erkennen, wie weit Hindernisse oder Wände von ihm entfernt sind. Das Radarsystem tastet die Umgebung ab und wandelt die gewonnenen Informationen in ein akustisches Klangbild um. Durch diese akustische Visualisierung der Umgebung ist der Träger nicht mehr auf die Reichweite seines Langstocks begrenzt. RaVis-3D ist ein Kooperationsprojekt im Rahmen des Europäischen Fonds für regionale Entwicklung, an dem neben drei Elektrotechnik-Lehrstühlen der Ruhr-Universität Bochum auch mehrere Industriepartner beteiligt sind. Das Projekt wurde in den Leitmarktwettbewerben der LeitmarktAgenturNRW erfolgreich beantragt und wird zu gleichen Teilen vom Land NRW und der EU gefördert.
Partner
Kampmann Hörsysteme GmbH, SNAP GmbH, Ruhr-Universität Bochum (ESIT, IKA, Integrierte Systeme), Dräger und Lienert Informationsmanagement GbR, Berufsförderungswerk Halle (Saale), GN Hearing GmbH
Fördergeber
Leitmarktagentur LifeSciences.NRW
Webseite
http://ravis-3d.de/
eMuCo

ICT-eMuCo is a European project supported under the Seventh Framework Programme (7FP), which is coordinated by Ruhr-Universität-Bochum. The aim of the project is to develop a platform for future mobile devices based on multi-core architecture maintaining a high flexibility and scalability in the system. This comprises the relevant controller element as well as the operating system and application layers.
EASY-C
The aim of the research in EASY-C will be to develop key technologies for the next generation of cellular networks (LTE and beyond). Therein our institute explores suitable processor platforms for the second layer of the protocol stack (MAC, RLC and PDCP) with a focus on concepts and models for hardware acceleration.
EASY-A
Der wachsende Bedarf an drahtlosen Kommunikationssystemen mit Übertragungsraten von mehreren Gigabit pro Sekunde stellt eine große technische Herausforderung dar. Sie kann nur durch Steigerung der spektralen Effizienz der Übertragungsverfahren oder durch Erschließung von bisher für die Mobilkommunikation ungenutzten Frequenzressourcen im Millimeterwellenbereich bewältigt werden. Hierbei untersucht der Lehrstuhl für Integrierte Systeme auf System-Ebene die Realisierung eines hochintegrierten 60 GHz Kommunikationssystems in einer kostengünstigen Siliziumtechnologie.
Impairments of Signal Integrity by RF
3GPP Long Term Evolution (LTE) is the successor of UMTS. Using higher order modulations and multiple antennas (MIMO) a datarate up to 200 Mbit/s is achieved. LTE is the first cellular standard using Orthogonal Frequency Division Multiple Access (OFDMA) which utilizes more efficiently the frequency spectrum. In the ISIRF-project the impact of analog components within the radio frontend on the signal integrity is investigated and suitable compensation methods are developed.
60-GHZWPAN
BEYOND GIGABIT WIRELESS SYSTEMS
The Wireless Personal Area Network (WPAN) is the short distance pendant of the popular wireless local area network (WLAN). A broadband communication system at 60GHz provides the capability to realize thousand fold higher data rates compared to WLAN. Thus, uncompressed video streams can be transmitted wireless from notebook to the video projector and a wired connection between (HD-) TV, DVD-player and Hi-Fi system can be omitted. The 60-GHz-WPAN-Project targets the design of analog RF building blocks and a receive chain in a 65 nm digital CMOS technology. More
Location based Services (LBS) integrated in IP Multimedia Subsystem (IMS)
Location-based services (LBS) are a key pervasive computing application that could deeply influence the way people use their mobile devices. Recent advances in mobile phones, GPS, and wireless networking infrastructures are making it possible to implement and operate large-scale LBS. In enabling LBS applications to interoperate with the Internet, using IP Multimedia Subsystem (IMS) which supports all the existing industrial standards (e.g., GSM, UMTS, GPS, AGPS), promises carriers and subscribers alike a suite of new location services. The integration of advanced LBS in IMS and the possible application of these services are suggested in this project.
Saw-less Frontend
In diesem Projekt werden Forschungsarbeiten für den Empfangspfad im Mobilfunk bearbeitet. Die besondere Herausforderung besteht darin externe steilflankige SAW-Filter durch elektrische Filter im Eingang des Empfangspfades zu ersetzen. Das elektrische Filter zeichnet sich dadurch aus, das es besonders rauscharm und linear ist.
Radar on Chip for Cars (ROCC)
Das wachsende Verkehrsaufkommen auf den Straßen fordert neue sicherheitsrelevante Konzepte innerhalb der Automobiltechnik. Aus Studien zu automobilen Radarsystemen geht hervor, dass ca. 88% aller Auffahrunfälle positiv von diesen Systemen beeinflusst werden könnten. Das Ziel des Projektes ist es, kostengünstige Radarsysteme auf hochintegrierten Siliziumchips für die nächste Generation der automobilen Radarsysteme bei 76-81 GHz zu realisieren. Der Lehrstuhl für Integrierte Systeme untersucht und entwickelt integrierte Schaltungskomponenten für das analoge Front-End dieser Radarsysteme.